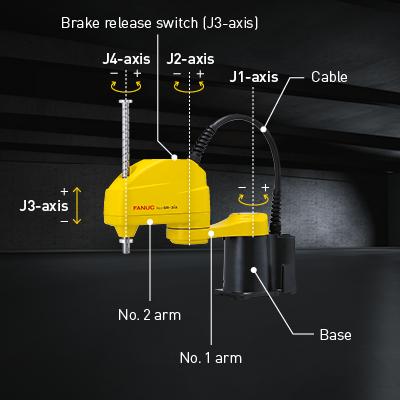
Arbeitsraum Roboter
Min 3 Achsen, Bewegungsmuster ohne mechanische Hilfsmittel programmierbar, kann Endeffektor haben.
Arbeitsraum roboter. Maschinen und Roboter mit umfassenden Sicherungssystemen und entsprechender Sensorik ermöglichen, dass Mensch und Maschine sich im gleichen Arbeitsraum bewegen und ohne Schutzzaun zusammenarbeiten können Um die Wirtschaftlichkeit zu erhöhen, hat sich das Projekt ARIZ zum Ziel gesetzt, einen flexiblen und wandlungsfähigen Produktionsassistenten in sicherer MenschMaschineKooperation. Mensch und Roboter bringen in den Fertigungsprozess ihre jeweiligen Stärken ein Glänzt einerseits der Mensch mit seinen kognitiven Fähigkeiten wie Kreativität, Lernen, Imagination, Orientierung, Problemlösungskompetenz etc, verrichtet andererseits der Roboter unermüdlich sich ständig wiederholende Tätigkeiten mit Kraft und Präzision. Zum Roboter stufenlos angepasst So lassen sich unnötige Verlangsamungen oder Stopps vermeiden Intelligente Arbeitsplanung Solange Mensch und Roboter sich nur einen Arbeitsraum teilen, ohne dass ein physischer Kontakt erforderlich ist, plant der Roboter seine Arbeitsschritte so, dass er bevorzugt.
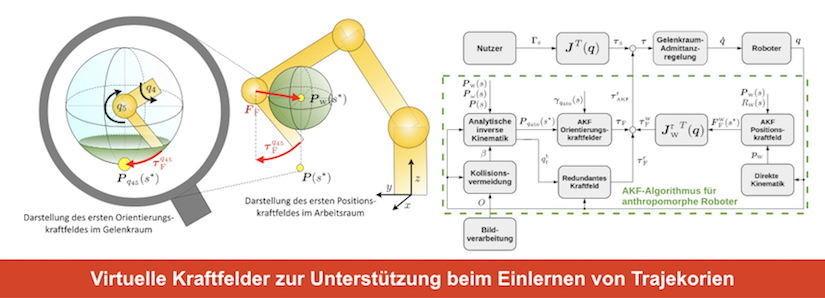
When working with robots, modeling and simulation enable you to prototype algorithms quickly and test scenarios by mimicking the behavior of realworld systems. Diese Technologie ordnet sich in das Gesamtkonzept der MenschRoboterInteraktion (MRI) ein, bei welchem sich Mensch und Roboter einen gemeinsamen Arbeitsraum teilen Ziel der vorliegenden Arbeit ist es, die Bedienung solcher Roboter für den Nutzer zu vereinfachen und intuitiver zu gestalten. Some iterative matrix relations for the geometric, kinematic and dynamic analysis of a Delta parallel robot are established in this paper The prototype of this manipulator is a three degree of.
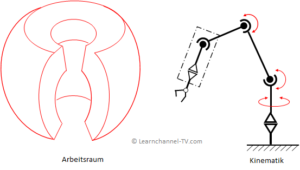
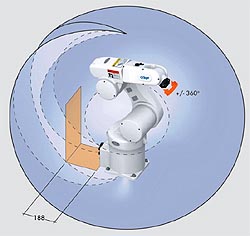
YuMi ist der erste wirklich kollaborative ZweiarmRoboter, der für Produktionsszenarien entwickelt wurde, in der Mensch und Roboter zusammenarbeiten Kollaborative Roboter sind in der Lage, die Flexibilität von Montageprozessen zu erhöhen, bei denen kleine Losgrößen in kurzen Zyklen hergestellt werden müssen. Der Arbeitsraum ist der Raum, Im Allgemeinen sind SCARARoboter we sentlich schneller als Un iversalroboter, weil die La st des Roboterarms durch Lagerungen aufgenommen wird und dadurch nicht mit beschleunigt werden muss Die Geschwindigkeit einer rotatorischen Achse wird in. 114 Arbeitsraum Bewegungsraumder Raum, der von allen bewegten Elementen des IR inklusive Effektor mit der Gesamtheit aller Roboter mechanik Kinematische Beschränkungen Kinematische Beschränkungen Bearbeitungs aufgabe Kontakt Kräfte * Effektor position Messwerte Effektorposition Kontakt.
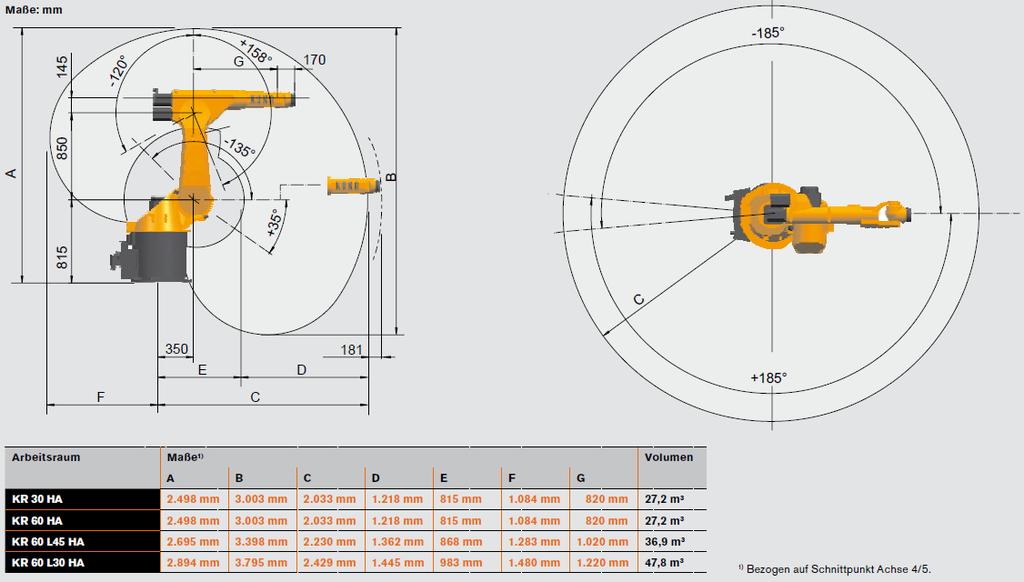
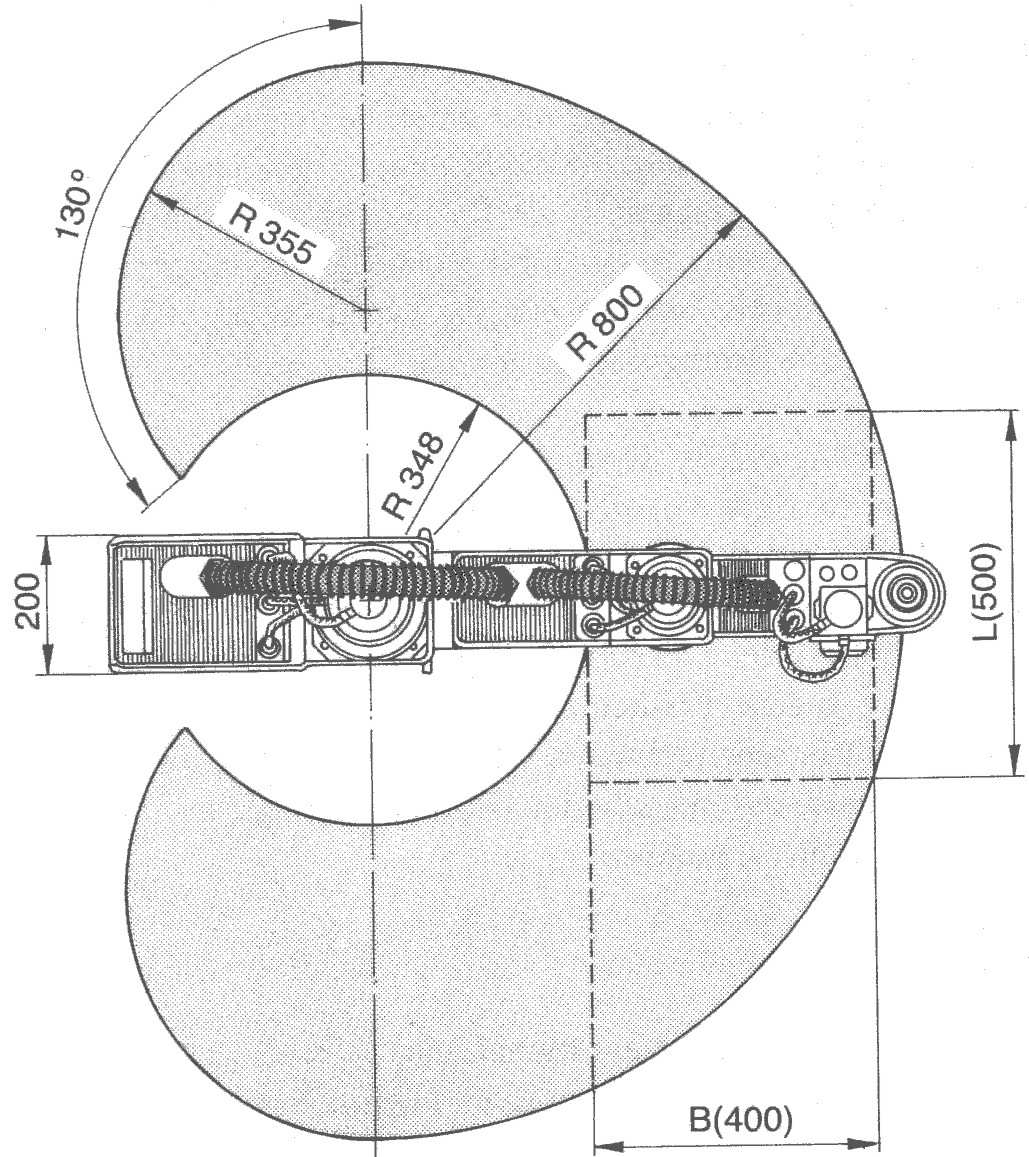
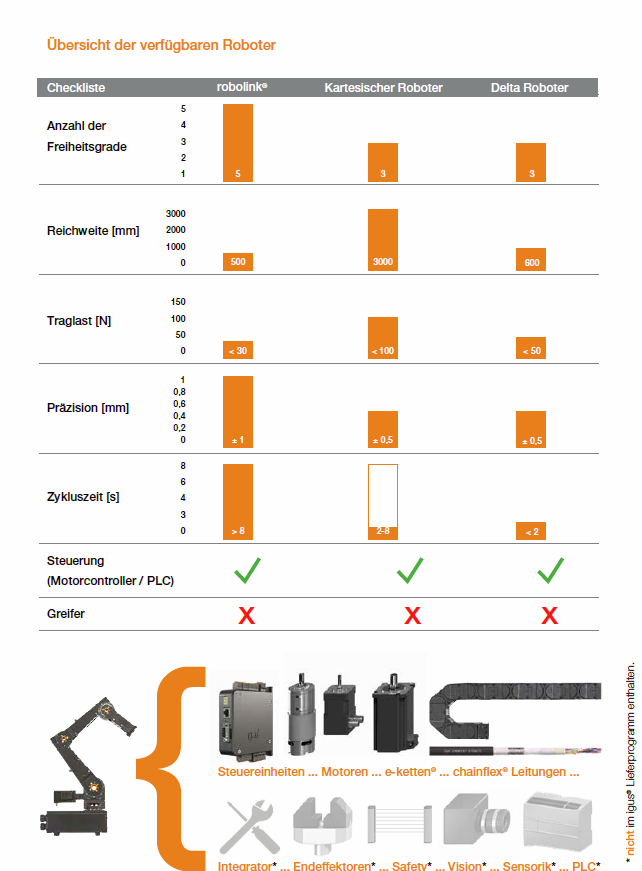
Flexibel Die Funktionsvielfalt der KUKA Roboter setzt Anwendungswünschen keine Grenzen Sie sind zusätzlich individuell anpassbar, zB durch Armverlängerungen Raumoptimiert Die schlanke Kontur schafft selbst in beengten Räumen Platz Dabei decken KUKA Roboter einen außergewöhnlich großen Arbeitsraum ab A KR 303 B KR 603 C KR 60 L453. Ihre Klebe bzw Dosieranwendung kann im Arbeitsbereich integriert werden Die Zelle wird mit Dokumentation und, je nach Anwendung, CEKennzeichnung geliefert Das 3AchsPortal mit einem Arbeitsraum von 500 x 500 x 100 mm wird von der igus Robot Control gesteuert. Arbeitsraum Die Punkte eines Raumes, welche von dem Roboter angefahren werden können Hierfür sind mindestens 3 Hauptachsen notwendig Hierfür sind mindestens 3 Hauptachsen notwendig Mechanische Freiheitsgrad f Ist die Anzahl der möglichen unabhängigen Bewegungen gegenüber seinem Bezugssystem.
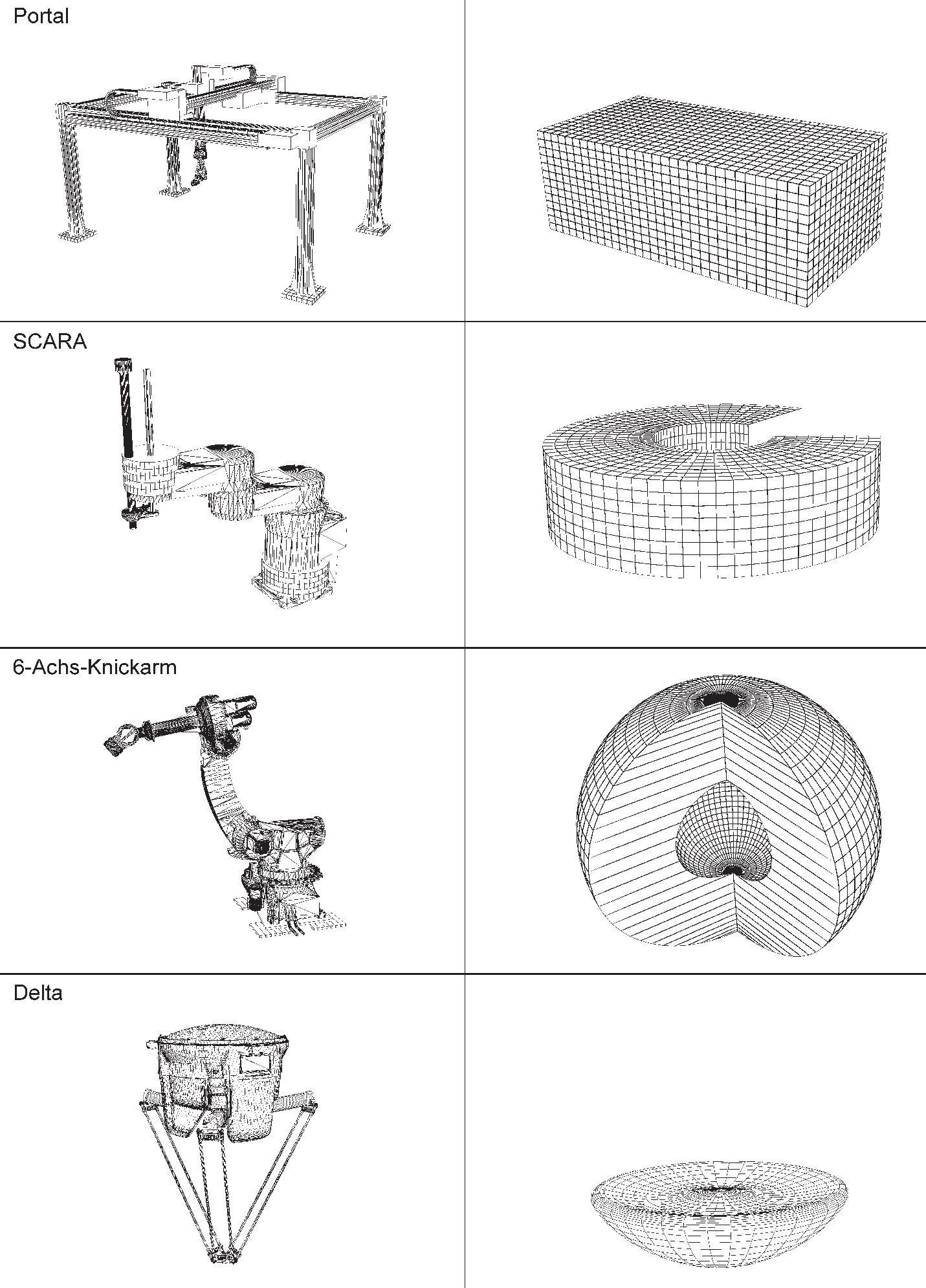
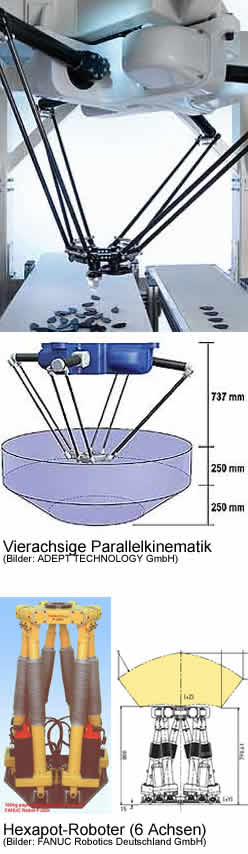
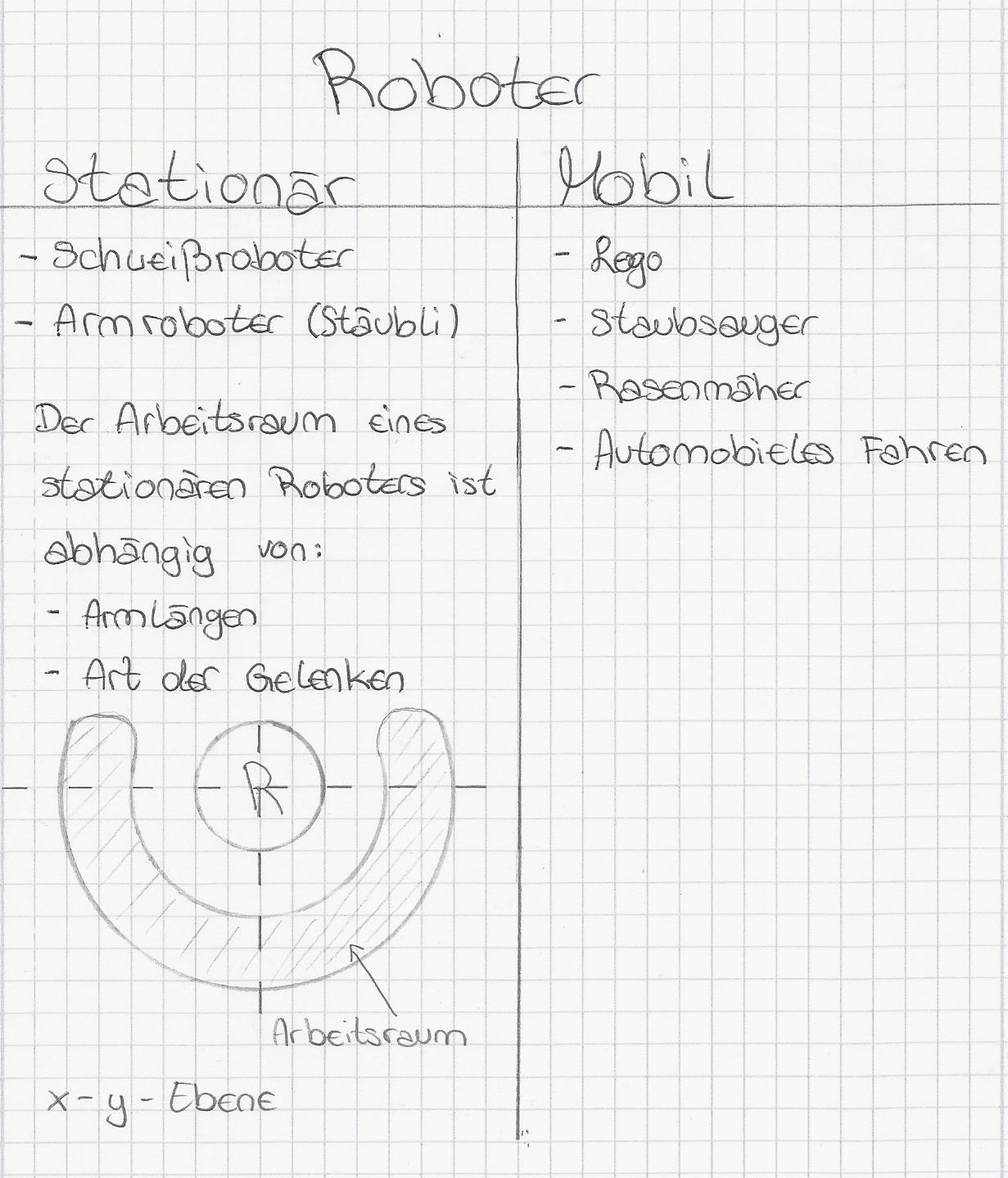
A robot's workspace is the total volume swept out by the end effector as the manipulator executes all possible motions The shape of the workspace dictates t. Auf diese Weise ist es problemlos möglich, ein Teil auf einem Förderband, das mit StandardMotionControl betrieben wird, mit dem Roboter zügig und geschickt zu greifen und wegzulegen Da der Aufbau und die Anzahl der Achsen den Arbeitsraum des Roboters bestimmen, ist dieser von verschiedenen Parametern abhängig Armlängen. Der Einsatz in der Praxis erwies bei den Titanteilen verkürzten sich die Bohrzeiten um bis zu 50 %, der Automatisierungsgrad stieg bei der Titan und AluminiumBearbeitung um bis zu 40 % und im Vergleich zu StandardRoboterApplikationen ergibt sich eine rund 40 % höhere OverallPerformance Das alles nach einer sehr kurzen Anlaufphase.
Mit diesem Verfahren kann man den Roboter in seinem lokalen Arbeitsraum sehr genau machen Mit einem solchen mobilen Vermessungsverfahren ist man auch in der Lage, Roboter auch erst nachträglich zu vermessen und durch ein mathematisches Modell, welches die einzelnen Fehler beschreiben, die Absolutgenauigkeit zu erhöhen. NotHalt, sicherer Arbeitsraum und sicher reduzierte Geschwindigkeit auf Roboter ausgedehnt werden Integrierte Zustandsüberwachung Durch die Integration der Robotersteuerung in Ihre Automatisierung lassen sich die Diagnose und der Zustand Ihrer Anlage wie auch Ihrer Roboter Siemens AG Digital Factory Postfach 48 48 Nürnberg Deutschland. Der Roboter der TruLaser Weld 5000 fährt entlang einer Linearachse und deckt auf diese Weise einen großen Arbeitsraum ab Passend dazu verfügt die Anlage über einen vier Meter langen Wendepositionierer.
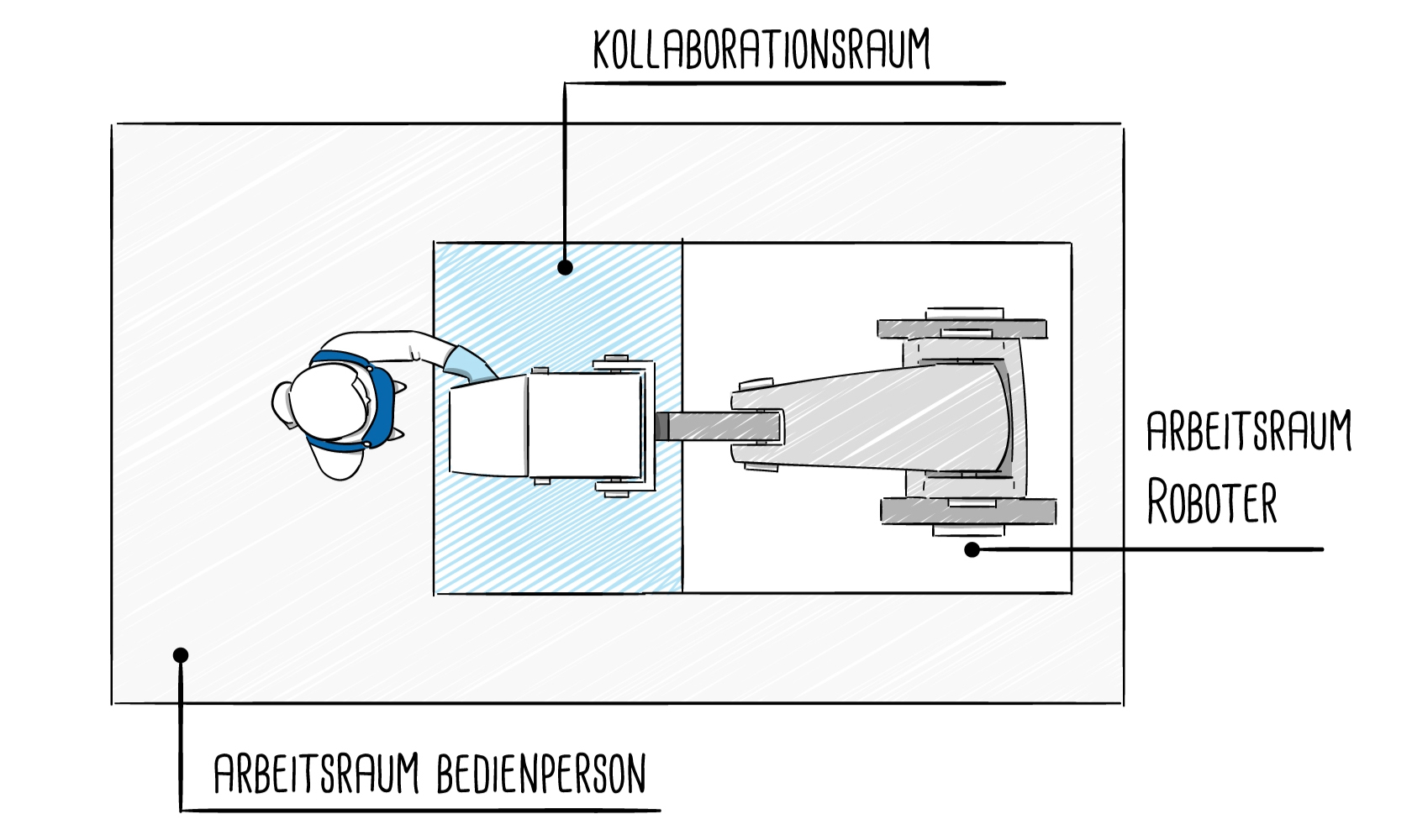
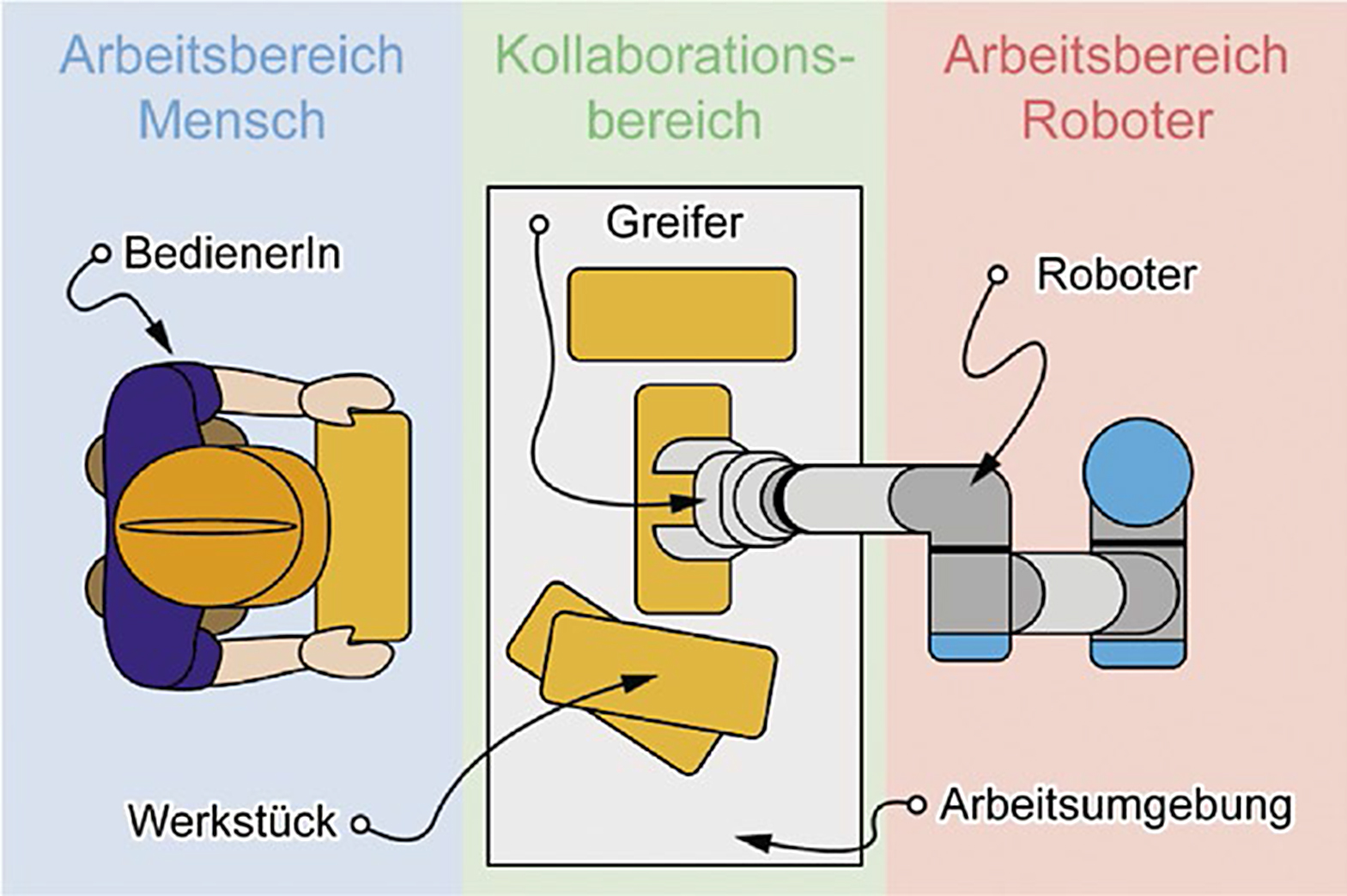
01 Kollaborativer Arbeitsraum gleichzeitige, gemeinsame Bearbeitung eines Werkstücks von Mensch und Roboter 02 Sicherer Umgang die Kombination von BionicMotionRobot mit dem hoch elastischen TentacleGripper 03 Denkbares Szenario im Einsatz mit einem Vakuumsaugnapf für flache und glatte Objekte 04 Enormes Kraftpotenzial das heraus. Der Arbeitsraum ist der Raum, der von de r Schnittstelle Nebenach se/ Endeffektor mit der Gesamtheit aller Achs bewegungen erreicht werden kann Der nicht nutzbare Raum eines IR entsteht durch Gelenke oder Achsbauteile, die beim Fahren im Raum mitbewegt werden müssen, dadurch auch mit dem Umfeld (Mensch oder Hardware) kollidieren können und somit eine erhebliche Gefahr darstellen. Ein Roboter ist eine technische Apparatur, die üblicherweise dazu dient, dem Menschen häufig wiederkehrende mechanische Arbeit abzunehmen Roboter können sowohl ortsfeste als auch mobile Maschinen sein und werden von Computerprogrammen gesteuert Die Wortbedeutung hat sich im Laufe der Zeit gewandelt.
The robot for everyone – sensitive, interconnected, adaptive and costefficient. Ein Roboter ist eine technische Apparatur, die üblicherweise dazu dient, dem Menschen häufig wiederkehrende mechanische Arbeit abzunehmen Roboter können sowohl ortsfeste als auch mobile Maschinen sein und werden von Computerprogrammen gesteuert Die Wortbedeutung hat sich im Laufe der Zeit gewandelt. A robot's workspace is the total volume swept out by the end effector as the manipulator executes all possible motions The shape of the workspace dictates t.
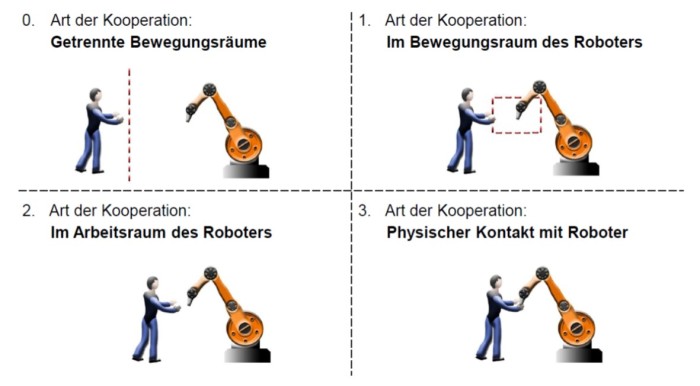
Werker und Roboter arbeiten kooperativ in einem gemeinsamen Arbeitsraum, der durch keinerlei Schutzeinrichtungen wie Sicherheitsscanner oder Lichtschranken überwacht wird. Arbeitsraumüberwachung und autonome Bahnplanung für ein sicheres und flexibles RoboterAssistenzsyst by Christina Ramer (Paperback, 19) Delivery US shipping is usually within 11 to 15 working days. Somit bei einem nachsigen Roboter immer mathematische Beziehungen zwischen n 1 Koordinatensystemen (n Achsen 1 Basiskoordinatensystem) herzuleiten Hierzu benutzt man ein Verfahren, das ursprünglich von Denavit und Hartenberg zur Beschreibung von mechanischen Starrkörperketten verwendet und Paul erweitert wurde.
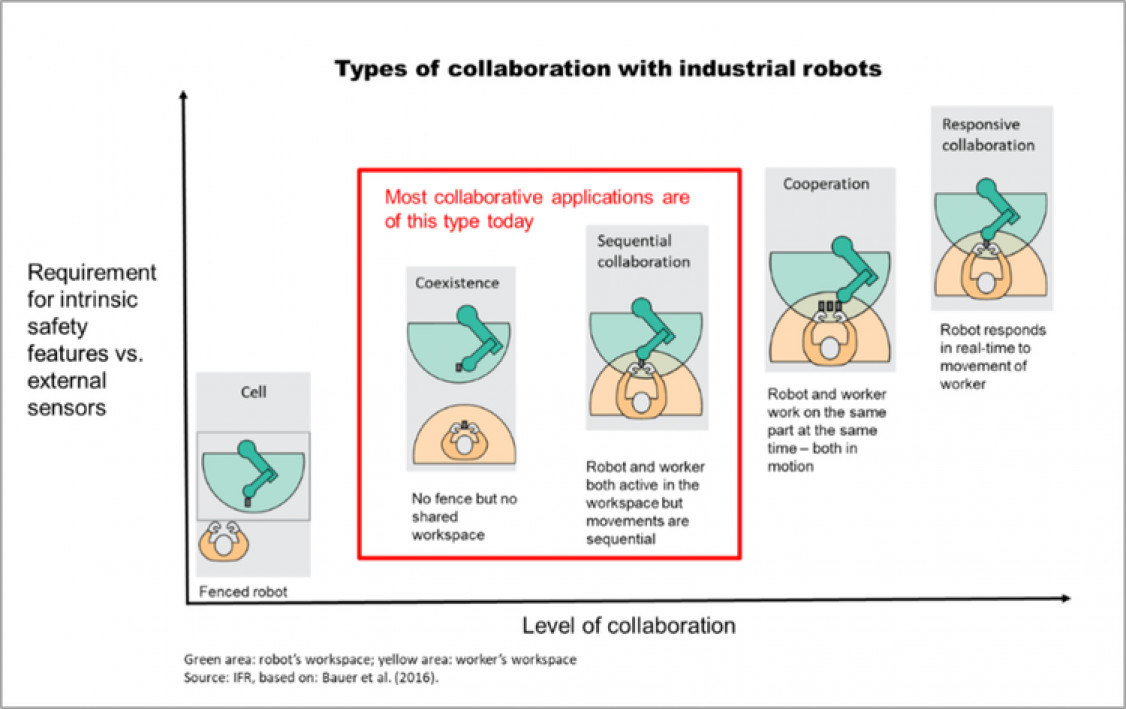
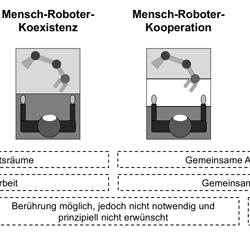
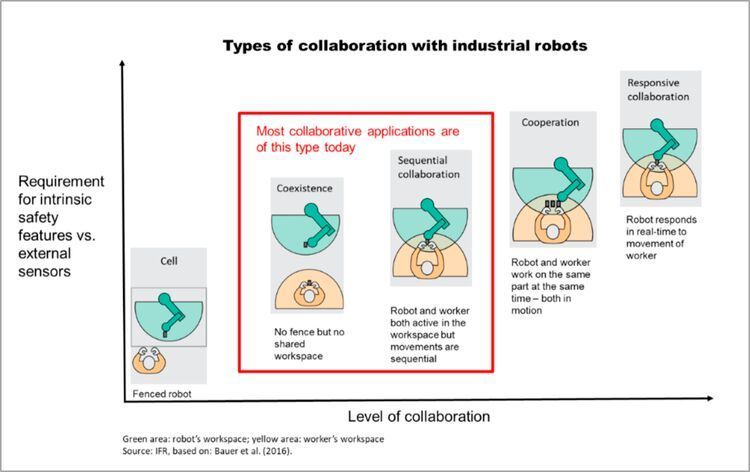
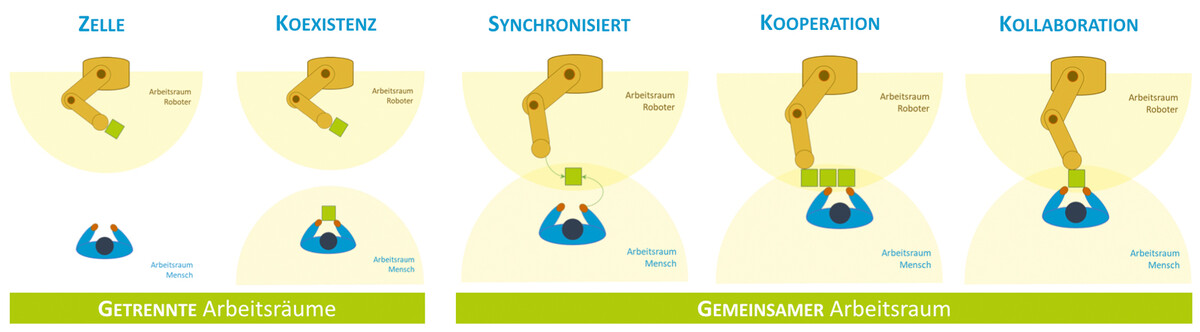
Gegenwärtig sind Anwendungen mit einem gemeinsamen Arbeitsraum (Shared Workspace) am häufigsten, bei denen Mensch und Maschine die Aufgaben nacheinander schrittweise erledigen – also sequenziell Anwendungen, bei denen Mensch und Roboter gleichzeitig am selben Teil arbeiten, sind im Vergleich dazu deutlich anspruchsvoller. Arbeitsraum · Anordnung der Roboter auf engstem Raum · Konzeption von kompakten Fertigungslinien möglich · Taktreduzierung · Höhere Wirtschaftlichkeit · 7 vollsynchronisierte Achsen · highest flexibility in his working range · highest robot density per installation space · conception of compact lines are possible · reduction of cycletime. Arbeitsraum, aber auch wegen desimmer günstiger werdenden PreisLeistungsVerhältnisses werden sie verstärkt auch in Bereichen außerhalb der Automobilindustrie eingesetzt Insbesondere in der Produktion und in der Logistik finden sich zunehmend Anwendungen, die sich mit Hilfe von Robotersystemen automatisieren lassen.
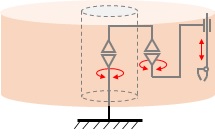
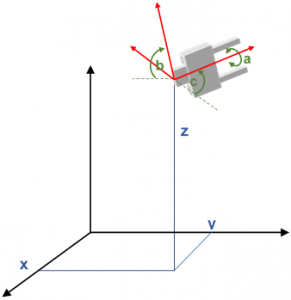
Darstellung Roboter bei Kurvenfahrt mit 450 mm/s, Kurvenradius mm 7 a b Ein LeanKonzept für das Zuschneiden kleiner Kunststoffteile liegt der CuttingBox «Small Part» zugrunde Der Arbeitsraum wird durch den schräggestellten Drehtisch optimal genutzt 8. Arbeitsraum Typische max Bauteilgröße (bei geschlossener Teleskopmitteltrennung) 600 mm x 600 mm x 600 mm Typische max Bauteilgröße (bei geöffneter Teleskopmitteltrennung) Kollaborativer Roboter UR10e mit sechs Achsen und KraftMomentenSensor Die Linearachse positioniert den Roboter links oder rechts. Je nach Arbeitsraum und Kinematik des Roboters bieten sich verschiedene Koordinatenangaben an, um Punkte anzufahren bzw die Geometrie des Arbeitsraumes zu beschreiben Sie wird bevorzugt für Roboter mit zylindrischen Arbeitsräumen Radius und Winkel werden polar angegeben Der Nullpunkt des Radius liegt im Koordinatenursprung.
Ausstellungsbereich „Mobile Roboter & Autonome Systeme“ (Halle 14, Stand J10/12) Exponate Visuelle Navigation mobiler Roboter Künstliche Haut Projektiontechnik zur Arbeitsraumüberwachung Fachtagung im Rahmen der 14 IFFWissenschaftstage vom 28 bis 30 Juni 11 „Sichere MenschRoboterInteraktion und Kooperation“ Termin. Arbeitsraumüberwachung und autonome Bahnplanung für ein sicheres und flexibles RoboterAssistenzsyst by Christina Ramer (Paperback, 19) Delivery US shipping is usually within 11 to 15 working days. 01 Kollaborativer Arbeitsraum gleichzeitige, gemeinsame Bearbeitung eines Werkstücks von Mensch und Roboter 02 Sicherer Umgang die Kombination von BionicMotionRobot mit dem hoch elastischen TentacleGripper 03 Denkbares Szenario im Einsatz mit einem Vakuumsaugnapf für flache und glatte Objekte 04 Enormes Kraftpotenzial das heraus.
Introducing the Franka Emika Robot Softrobot performance, smart and industryready Enabling automation for anyone, anywhere. Durch Einsatz von Industrierobotern mit ihrem flexiblen Arbeitsraum kann nun vieles davon auf den Roboter konzentriert werden, sodass Seiten, Böden, Traverleisten, Mittelpfosten, Rückwände, usw nur noch an die Maschine transportiert werden müssen Alles Weitere kann ohne den extrem produktspezifischen Einsatz von ServoAchsen durch Roboter. Mensch und Roboter bringen in den Fertigungsprozess ihre jeweiligen Stärken ein Glänzt einerseits der Mensch mit seinen kognitiven Fähigkeiten wie Kreativität, Lernen, Imagination, Orientierung, Problemlösungskompetenz etc, verrichtet andererseits der Roboter unermüdlich sich ständig wiederholende Tätigkeiten mit Kraft und Präzision.
114 Arbeitsraum Bewegungsraumder Raum, der von allen bewegten Elementen des IR inklusive Effektor mit der Gesamtheit aller Roboter mechanik Kinematische Beschränkungen Kinematische Beschränkungen Bearbeitungs aufgabe Kontakt Kräfte * Effektor position Messwerte Effektorposition Kontakt. Roboter und Zellen können je nach Applikationskopf für unterschiedliche Arbeiten eingesetzt werden Überzeugend auch der Investitionsschutz „Sollten veränderte Aufträge mal einen Prozess oder eine Maschine obsolet machen, kann ich die Zelle und den Roboter auf andere Prozesse umrüsten“, so Peter Strittmatter. Abstract In the context of a parallel manipulator, inverse and direct Jacobian matrices are known to contain information which helps us identify some of the singular configurations In this article, we employ kinematic analysis for the Delta robot to derive the velocity of the endeffector in terms of the angular joint velocities, thus yielding the Jacobian matrices.
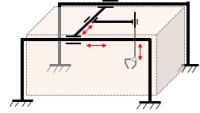
Teilen sich Mensch und Roboter einen Arbeitsraum, sprechen wir von Kooperation Dies können zB Übergabestationen sein, bei denen der Mensch ein Teil oder Werkstück übergibt und der Roboter dies anschließend abholt Mensch und Roboter arbeiten zwar in einem gemeinsamen Raum, aber zu unterschiedlichen Zeitpunkten. Roboter und Zellen können je nach Applikationskopf für unterschiedliche Arbeiten eingesetzt werden Überzeugend auch der Investitionsschutz „Sollten veränderte Aufträge mal einen Prozess oder eine Maschine obsolet machen, kann ich die Zelle und den Roboter auf andere Prozesse umrüsten“, so Peter Strittmatter. Perhaps the most significant recent development is the coming into force of the european Landscape Convention, whose provisions have to be implemented in national legislation in some '0 countries one of the most innovative developments contained in the Convention is the recognition that landscape covers the whole territory of a member state, and that urban and periurban landscapes, where the.
The robot for everyone – sensitive, interconnected, adaptive and costefficient. Introducing the Franka Emika Robot Softrobot performance, smart and industryready Enabling automation for anyone, anywhere. Abstract A complex solution of a design of the DELTA type robot, ie the robot with parallel kinematics, is described in this paper The project ensued from cooperation with the company Dyger, sro, with the objective to develop a robotic device suitable for highspeed handling of small objects and applicable in many industrial configurations.
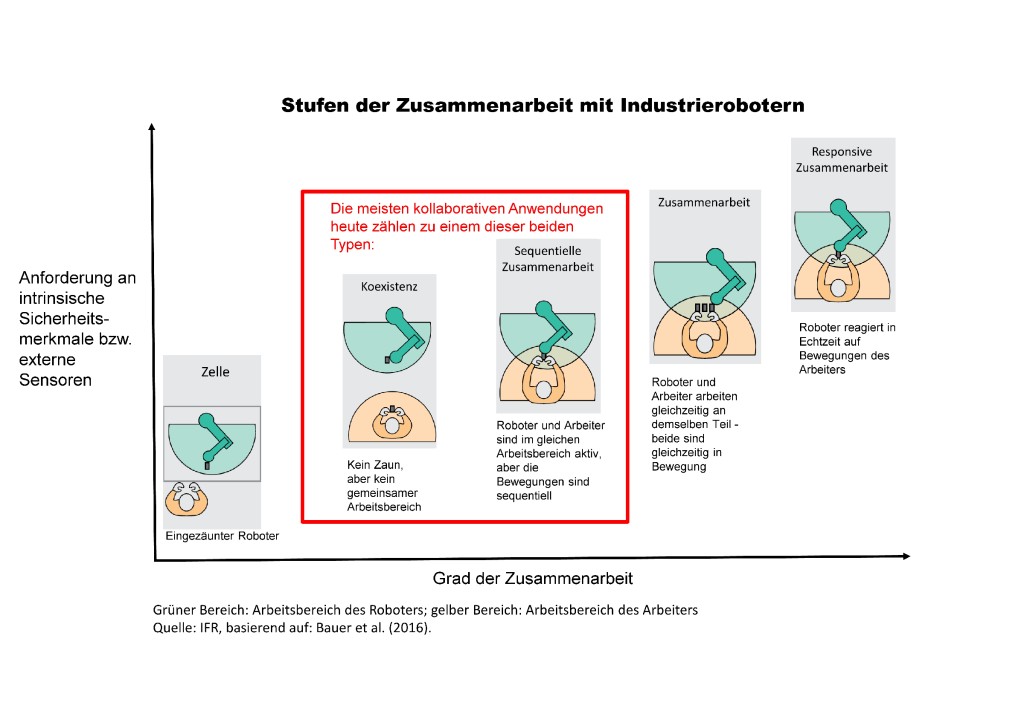
Die vorliegende Arbeite soll zur Entwicklung von Modellen zur Lageregelung von Industrierobotern in drei Bereichen beitragen der Kinematik, der Dynamik und der Lageregelung durch die Rückführungsentkopplung Eingangs wurde das Hilfsmittel zur Kinematik und Dynamik von Industrierobotern, nämlich das körperfeste Koordinatensystem, erläutert. 1 Verfahren zum Überprüfen und/oder Einmessen eines an einem Roboter (110) befestigten Werkzeugs (1) innerhalb der Roboterzelle (100), wozu das Werkzeug (1) zu wenigstens einer im Arbeitsraum des Roboters (110) ortsfest angeordneten Messvorrichtung (210, 2) bewegt und an dieser Messvorrichtung (210, 2) wenigstens eine Messung durchgeführt wird. Vom Fräsen über Schweißen bis hin zum 3DDrucken erledigt Kollege Roboter Aufgaben für uns, die ohne ihn fast unmöglich wären Mit dem Roboterarm bearbeiten wir großvolumige Werkstücke Bei einem Arbeitsraum von 8 x 2,5 x 2 Metern.
Abstract In the context of a parallel manipulator, inverse and direct Jacobian matrices are known to contain information which helps us identify some of the singular configurations In this article, we employ kinematic analysis for the Delta robot to derive the velocity of the endeffector in terms of the angular joint velocities, thus yielding the Jacobian matrices. Rotary Delta Robot Forward/Inverse Kinematics Calculations Tweak your robot dimensions and see how it will affect your work envelope and your precision. Der Einsatz in der Praxis erwies bei den Titanteilen verkürzten sich die Bohrzeiten um bis zu 50 %, der Automatisierungsgrad stieg bei der Titan und AluminiumBearbeitung um bis zu 40 % und im Vergleich zu StandardRoboterApplikationen ergibt sich eine rund 40 % höhere OverallPerformance Das alles nach einer sehr kurzen Anlaufphase.
Workspace 5™ is no longer being supported Download Workspace LT™ now to upgrade your experience and get all the latest updates to Workspace. Der Roboter der TruLaser Weld 5000 fährt entlang einer Linearachse und deckt auf diese Weise einen großen Arbeitsraum ab Passend dazu verfügt die Anlage über einen vier Meter langen Wendepositionierer. Optimaler Arbeitsraum Mit der Fähigkeit, Punkte sowohl nahe der Roboterbasis als auch im Überkopfbereich zu erreichen, und mit Reichweiten bis zu 1100 mm bietet der KR AGILUS einen optimalen Arbeitsraum Zusätzliches Equipment kann an mehreren Montagepunkten auf dem Arm, an der Hand, an der Schwinge und.
Workspace 5™ is no longer being supported Download Workspace LT™ now to upgrade your experience and get all the latest updates to Workspace. Diese Technologie ordnet sich in das Gesamtkonzept der MenschRoboterInteraktion (MRI) ein, bei welchem sich Mensch und Roboter einen gemeinsamen Arbeitsraum teilen Ziel der vorliegenden Arbeit ist es, die Bedienung solcher Roboter für den Nutzer zu vereinfachen und intuitiver zu gestalten. Roboter sind per Definition in ISO 73 1 universelle Betriebsmittel Durch diese universelle Einsetzbarkeit und die Notwendigkeit, den Roboter und seine Peripheriekomponenten für eine konkrete.
Teilsysteme Zusammenfassung Studocu
2
Roboter In Der Modernen Reinraumproduktion Chemanager
Arbeitsraum Roboter のギャラリー

Roboter Konformitatserklarung Mit Software Weka Manager Ce

Sobald Sie Uber Einen Schutzzaun Nachdenken Mussen Springen Die Meisten Schon Ab Kuka Blog
Www Hs Koblenz De Fileadmin Media Profiles Ingenieurwesen Elektrotechnik Und Informationstechnik Ross Rob Material Slides Pdf
Homepages Thm De Hg6458 Robotik Robotik Pdf

Die Bewertung Von Cobot Risiken Erhoht Die Sichere Interaktion Digikey

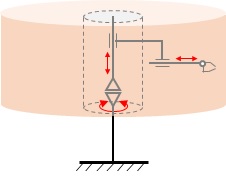
Scara Roboter Deckt Zylindrischen Arbeitsraum Ab
Http Www Tu Harburg De Ft2 Wo Scripts Robotik Robotersysteme Pdf
Mensch Technik Interaktion Forschung Robotik Und Mensch Technik Interaktion Et It Tu Chemnitz

T Rox Seite 2 Teaching Robots In Saxony
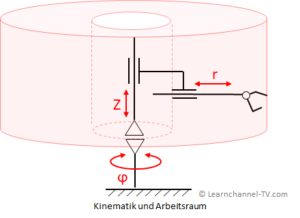
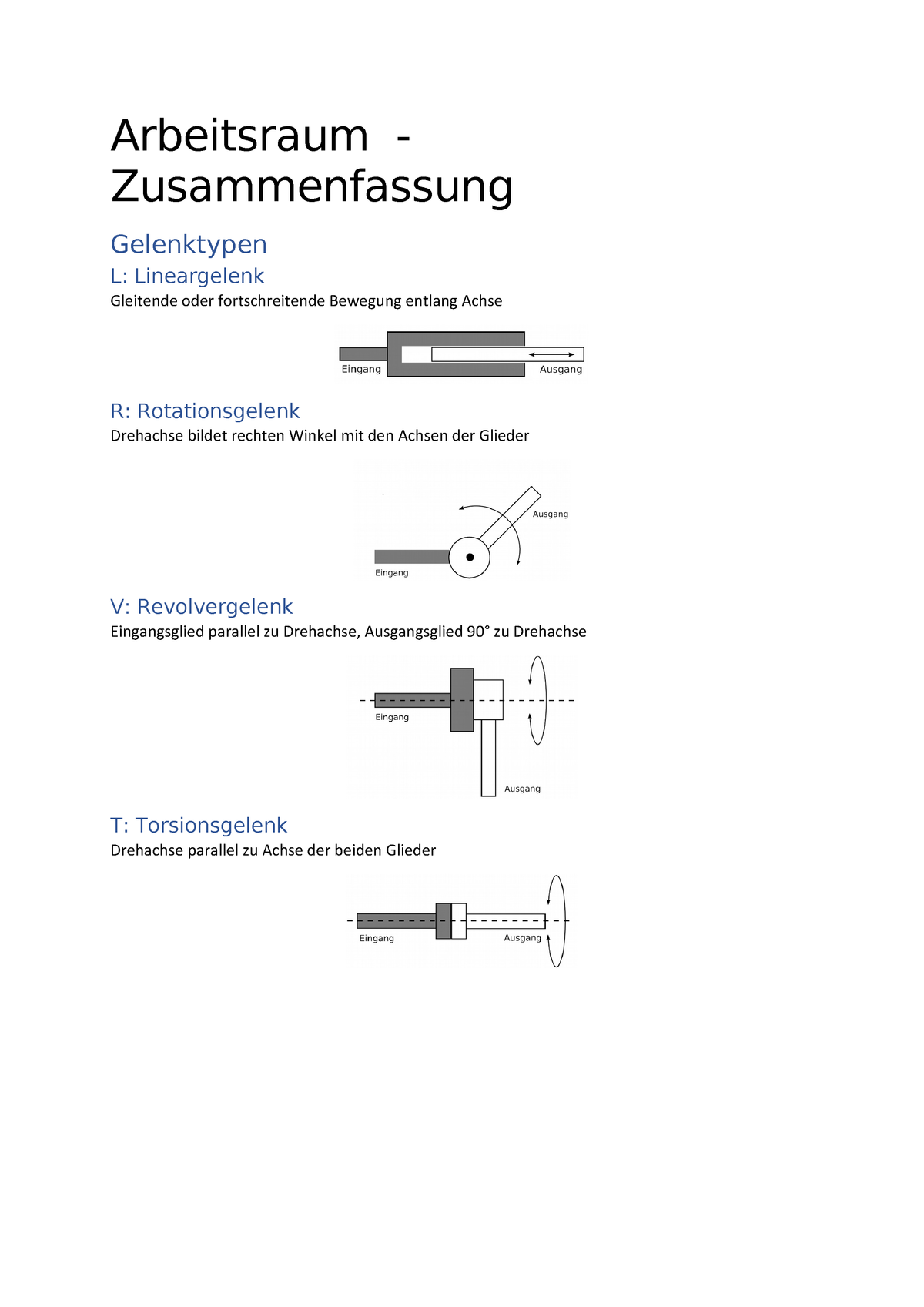
Klassifizierung Roboter Learnchannel Tv Com
Mensch Roboter Kollaboration Sicheres Wissen

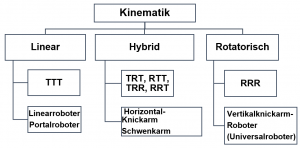
Klassifizierung Roboter Nach Kinematik Und Arbeitsraum
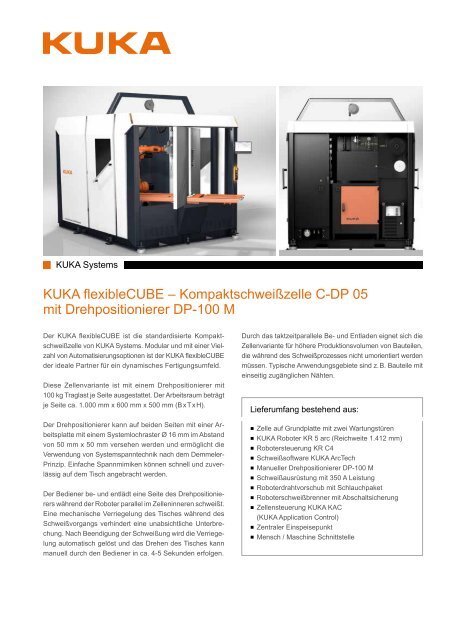
Kompaktschweiaÿzelle C Dp 05 Mit Kuka Systems
Zusammenarbeit Von Mensch Und Roboter Ingenieur De
Industrie Management De Sites Industrie Management De Files Kopp Kollaborierende Oder Kollaborationsfaehigeroboter Im 2 Pdf
Mensch Und Cobot Grundlagen Der Kollaborativen Robotik
Link Springer Com Content Pdf m 3a978 3 663 4 2f1 Pdf

Mensch Roboter Kollaboration Sicheres Wissen
Q Tbn And9gcsheefb7vzvgweqnlfdh43ees1yvst Rnaw8o3osvrtngyslxs Usqp Cau
Special Week 1617 Zeichenmaschinen Gelenkarm Roboter s Pdf Kostenfreier Download

Scara Roboter Horizontal Knickarm Roboter

Oa Kopp 2 Industrie Management
Link Springer Com Content Pdf m 3a978 3 663 4 2f1 Pdf

Scara Roboter Aufbau Einsatzgebiete Sowie Vor Und Nachteile

Aubo I5 Villingen Schwenningen Engineering For You Gmbh
Industrieroboter Springerlink

Klassifizierung Roboter Nach Kinematik Und Arbeitsraum
Klassifizierung Roboter Nach Kinematik Und Arbeitsraum
Link Springer Com Content Pdf m 3a978 3 663 4 2f1 Pdf
Die Wichtigsten Roboter Trends Home Of Welding
Tipps Fur Eine Sichere Mensch Roboter Kollaboration Ingenieur De
Klassifizierung Roboter Nach Kinematik Und Arbeitsraum
Homepages Thm De Hg6458 Robotik Robotik Pdf
Wichtigsten Begriffe Industrieroboter Studydrive
Www Hs Koblenz De Fileadmin Media Profiles Ingenieurwesen Elektrotechnik Und Informationstechnik Ross Rob Material Slides Pdf
Q Tbn And9gcqeocrjnufr3ncnpudqrcm1ksig33sm0x90x3fuarjktcgalyjm Usqp Cau

Modul 5 Flashcards Questions And Answers Quizlet
Weber4 19online 19print Fabriksoftware
Brommi Projektblatt Biona 1

Robotik Mein Roboter Erledigt Das Fur Mich Pdf Kostenfreier Download
Beckhoff Information System German
Welche Robotertypen Gibt Es Und Welcher Roboter Ist Der Richtige Fur Meine Anwendung Igus Blog
Mediatum Ub Tum De Doc Pdf
Http Link Springer Com Content Pdf 10 1007 2f978 3 48 9028 3 8 Pdf
Doppelarm Scara Roboter Kaiser Engineering Gmbh
Cms Retrofit De Pdf Roboteransteuerung Ist Bereits In Maschinensteuerung Integriert Mm 45 14 01 De Pdf

Robotik Der Kluge Roboter Gibt Nach Archiv
Wi Uni Potsdam De Homepage Lehrewi Nsf 0 2213b27ccbe6f9cc224 File 7 iiot robotik 1 002 Pdf 7 iiot robotik 1 Pdf
Www Uni Saarland De Fileadmin User Upload Professoren Freyg Lehre Aepr Pdf Versuchsanleitungen Aepr V5 Versuchsanleitung 18 04 19 Pdf
Roboter Werden Immer Kollegialer Intelligenter Und Digitaler

Cxw Moderne Schwarze Arbeitsraum Art Deco Roboter Tischlampe E27 Glanz Schreibtisch Licht Wandleuchte Fur Studie Schlafzimmer Nachttischlampen Werkstatt Buro Amazon De Beleuchtung

Bewegungstechnik Robotik Institut Fur Naturstofftechnik Tu Dresden
Http Www Tu Harburg De Ft2 Wo Scripts Robotik Robotersysteme Pdf
2

Vertikal Knickarmroboter Vertikal Gelenkarmroboter
Q Tbn And9gcqgfywxbsiy 9f46mvldp1bpm6x0myxkqdi5c0vuphrm64sft8m Usqp Cau
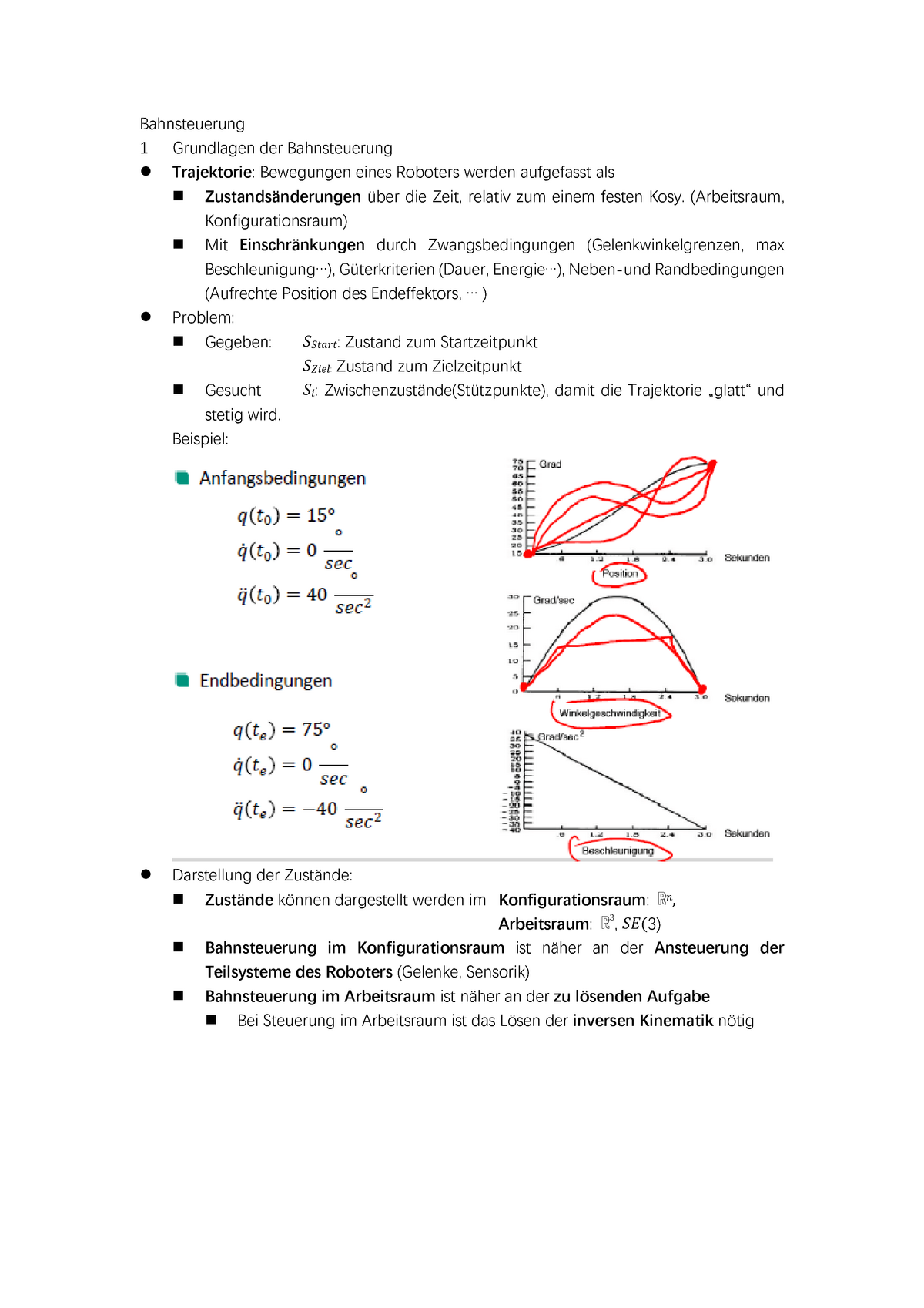
07bahnsteuerung Sommersemester Studocu

Roboterintegration Sorgt Fur Mehr Effizienz Automation At

Beispiel 2 Spinner Werkzeugmaschinen
Klassifizierung Roboter Learnchannel Tv Com

3 Flexible Handhabungstechnik Flashcards Quizlet

Regelbasierter Kollisionsvermeidungs Algorithmus Fur Roboter Mit Zylinderformigem Arbeitsraum At Automatisierungstechnik
Http Www Home Htwg Konstanz De Bittel Ain Robo Vorlesung 01 Einleitung Pdf
Klassifizierung Roboter Learnchannel Tv Com
4 Roboterkinematiken Pdf Kostenfreier Download
:quality(80)/images.vogel.de/vogelonline/bdb/204300/204359/original.jpg)
Scara Roboter Deckt Zylindrischen Arbeitsraum Ab Bild 1 1
Publikationsserver Tu Braunschweig De Servlets Mcrfilenodeservlet Dbbs Derivate Diss Rost Sven Pdf
Wi Uni Potsdam De Homepage Lehrewi Nsf 0 2213b27ccbe6f9cc224 File 7 iiot robotik 1 002 Pdf 7 iiot robotik 1 Pdf

Mensch Roboter Kollaboration In Der Industriellen Montage Grin

Swissrobotics Net Roboter Flexibilitat Inbegriffen

Dlr Institut Fur Robotik Und Mechatronik Regelung Von Leichtbaurobotern
Scara Roboter Aufbau Einsatzgebiete Sowie Vor Und Nachteile
Klassifizierung Roboter Nach Kinematik Und Arbeitsraum
Welche Robotertypen Gibt Es Und Welcher Roboter Ist Der Richtige Fur Meine Anwendung Igus Blog

Grundlagen Der Robotertechnik

Mensch Und Roboter In Einem Arbeitsraum Von Der Idee Bis Zur Umsetzung Kompetenzzentrum Magdeburg

Einfuhrung Einer Mensch Roboter Kollaboration In Der Montage
Robotik In Der Logistik Einsatzpotenziale Herausforderungen Und Trends Springerlink
Q Tbn And9gcss5heyznn7sojnfxb2pfwzhjfhb2 C8slfee1zxfx Ui5sxowz Usqp Cau
Homepages Thm De Hg6458 Robotik Robotik Pdf

Industrieroboter Distrelec Schweiz
Homepages Thm De Hg6458 Robotik Robotik Pdf
2
Wie Sie Wissen Ob Ein Scara Roboter Die Richtige Wahl Fur Ihre Anwendung Ist
Vertikal Knickarm Roboter Adept Viper S Montage Handhabungs Und Verpackungsaufgaben
Kinematik Learnchannel Tv Com
Link Springer Com Content Pdf 10 1007 2f978 3 322 811 2 2 Pdf

Mensch Roboter Kooperation Bei Der Ventilmontage Mitarbeiter Und Roboter Teilen Sich Arbeitsraum Automationspraxis
Www Hs Koblenz De Fileadmin Media Profiles Ingenieurwesen Elektrotechnik Und Informationstechnik Ross Rob Material Slides Pdf
Parallelkinematik Roboter Hexapod Roboter
Mensch Roboter Kollaboration Sicheres Wissen

Robotertechnik Aus Drucktechnischen Grunden Leere Folie Pdf Kostenfreier Download
Icm Chemnitz Mensch Roboter Kollaboration
Robotik Jahr 2 Dein Spickers Webseite

1 3 5 1 Probleme Von Baurobotern Mit Grossem Arbeitsraum Und Nutzlast Download Scientific Diagram

Umwelt Online Bgi 5123 Dguv Information 9 074 Industrieroboter 1
Www Studocu Com De Document Technische Hochschule Mittelhessen Robotik Altklausuren Probeklausur 14 Fragen Und Antworten View
Industrie Roboter It Spots

Handzahme Greifer Fur Die Mensch Roboter Kollaboration

Roboter Lehrstuhl Fur Ergonomie

7 Achse Vielfache Moglichkeiten Mehr Arbeitsraum Fur Roboter Autocad Magazin



